

Offshore-Anlagen-Wartung: Unterwasserroboter befährt vertikale Oberflächen
Der "Crawfish" soll Offshore-Energieanlagen inspizieren und teilweise reparieren können. Der Roboter kann dazu unter Wasser vertikale Oberflächen befahren.
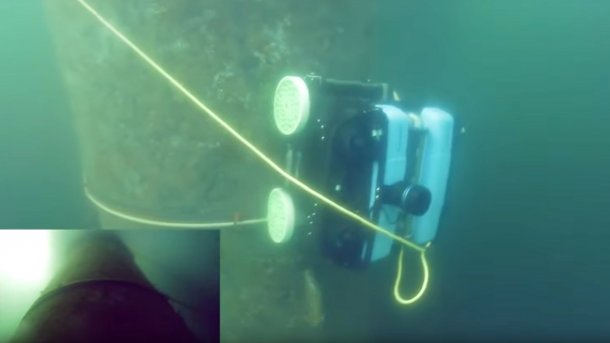
Der Unterwasserroboter Crawfish kann im Wasser vertikale Oberflächen befahren.
(Bild: Fraunhofer SOT (Screenshot))
Fraunhofer Smart Ocean Technologies (SOT) hat mit "Crawfish" einen Unterwasserroboter entwickelt, der zu Wartungsarbeiten an Offshore-Windkraftanlagen eingesetzt werden kann. Das Besondere: Der Roboter kann unter Wasser vertikale Oberflächen erklimmen, untersuchen und teilweise auch reparieren.
Der Einsatz von Tauchern zur Inspektion und Instandhaltung von Energieanlagen auf hoher See ist teuer und zeitaufwendig. Zusätzlich bestehen Gefahren für Leib und Leben der Taucher. Das SOT hat deshalb einen Weg gesucht, Inspektionen und einfache Reparaturen zu automatisieren.

Herausgekommen ist dabei der Unterwasserroboter Crawfish, wie SOT in einer Projektbeschreibung erläutert. Der Roboter basiert im Wesentlichen auf dem Open-Source-Unterwasserroboter BlueROV2 des kalifornischen Unternehmens Blue Robotics. Den Raupenantrieb haben die Forscher des SOT gegen vier direkt angetriebene additiv gefertigte Räder ausgetauscht, die mit einem negativen Sturz an Pendelachsen angebracht sind und sich der Oberfläche in einem gewissen Maß anpassen können. Der Roboter kann sich so ferngesteuert auf ebenen und gekrümmten Flächen frei bewegen und mit einer Abweichung von wenigen Millimetern genau gesteuert werden. Auf röhrenartigen Objekten muss der Durchmesser des Rohres jedoch größer als ein Meter sein, um einen sicheren Halt zu gewährleisten.
Hoher Anpressdruck für vertikales Klettern
Die Beweglichkeit im Wasser erzeugen mehrere Propellerturbinen. Um auch vertikale Oberflächen befahren zu können, besitzt der Crawfish vier vertikal angebrachte Thruster, die dann für den nötigen Anpressdruck von bis zu 90 N auf der zu befahrenden Oberfläche sorgen. Der Roboter wird mit einer Bordspannung von 14,8 V über Akkus betrieben, die bei einer Anpresskraft von 50 N etwa 25 Minuten lang durchhalten sollen. Im Normalbetrieb, freischwebend im Wasser – etwa für Inspektionsarbeiten –, hält der Akku über 60 Minuten durch, versprechen die Wissenschaftler.
Der 22 kg schwere Roboter besitzt zusätzlich einen Bereich für kleinere Nutzlasten mit einer Größe von 26 cm x 20 cm x 54 cm. Ausgestattet ist er mit einer Kamera, über die er Bilder an den Operator liefert. Die maximale Operationstiefe liegt bei 50 m.
Risse finden, Beschädigungen ausbessern
Für zwei Aufgaben kann Crawfish bislang eingesetzt werden: zum einen das Auffinden von Rissen etwa in Schweißnähten und zum anderen die Beseitigung kleiner Schäden der Korrosionsschutzfarbe an Offshore-Anlagen.
Das Auffinden der Risse erfolgt über spezielle Monitoring-Systeme wie etwa einer CoMoBelt-Sensormanschette, die an neuralgischen Punkten der Anlage befestigt sind. Crawfish platziert einen Sensorkopf punktgenau, um die Monitoring-Daten auszulesen. Das funktioniert induktiv, die Messdaten werden auf kurze Distanz über WLAN übermittelt.
Kleinere Reparaturarbeiten am Korrosionsschutz führt der Unterwasserroboter mittels einer kleinen Bürste aus, die an einer Lineareinheit befestigt ist. Ein spezielles Beschichtungsmaterial, das aus zwei Komponenten besteht, wird über einen Schlauch gepumpt und über die Bürste an den beschädigten Stellen aufgetragen. Das Andocken erfolgt manuell per Fernsteuerung, den Auftrag des Beschichtungsmaterials erledigt der Roboter automatisch. Schweißarbeiten kann Crawfish noch nicht durchführen, die Forscher des SOT halten dies jedoch in der Zukunft für möglich.
Einen Eindruck über den Crawfish-Roboter vermitteln Videos, die auf der Projektseite zu sehen sind.
(olb)