
VariAnt im Test: Die LEDs blinken, aber die Roboter-Ameise läuft nicht
VariAnt ist ein Roboter, der sich ganz ohne Löten zusammenbauen lässt. Allerdings wurde TR-Redakteur Wolfgang Stieler beim Aufbau etwas rappelig.
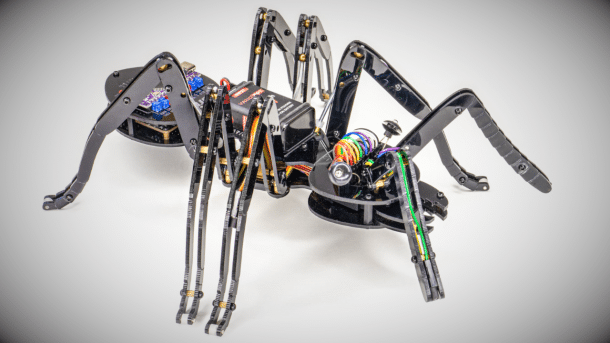
VariAnt ist der neueste Roboterbausatz von Variobot. Es ist für 199 Euro bei variobot.com erhältlich.
(Bild: Variobot)
Sie läuft nicht. Nach rund acht Stunden Schrauben, Stecken, Fummeln – und Fluchen – habe ich den autonomen Ameisen-Roboter von Variobot fertig montiert. Ich habe die Arduino-Software installiert, den Code abgetippt, ihn auf den Roboter übertragen und die Maschine gestartet. Und jetzt das: Die LEDs blinken fröhlich wie erwartet, aber die Motoren laufen nicht an. Keine Drehung, kein Mucks, nichts. Ich bin zutiefst frustriert.
VariAnt ist ein Ameisen-Roboter mit sechs Beinen, die mithilfe von zwei kleinen Elektromotoren angetrieben werden. Der Bot ist mit zwölf Sensoren ausgestattet und wird von einem Arduino-kompatiblen Mikrocontroller gesteuert. Vorausgesetzt, das richtige Programm ist geladen, kann das Maschinchen also Markierungen auf dem Boden ablaufen oder einer Lichtquelle folgen und erkennt Hindernisse oder Helligkeitsunterschiede.
Aufbau für Ungeübte mindestens acht Stunden
Das Roboter-Tier wird im kompakten Flatpack geliefert: Die – überraschend – kleine Schachtel enthält 345 Teile. Laut Anleitung soll der Aufbau vier bis acht Stunden dauern. Wobei diese Zahlen eher optimistisch sind: Für Ungeübte sind es mindestens acht Stunden. Denn die mechanischen Teile des Roboters bestehen aus schwarzen Acryl-Teilen, die mit – ebenfalls schwarzen – zum Teil winzigen Schrauben montiert werden. Die Montage der Beine ist ein besonderes Highlight: Als Gelenkverbindung dienen kleine Messingkugeln, die mit Schmiermittel eingerieben werden und auf die dann unter Spannung die Beine aufgeklippt werden – natürlich ohne die bereits angebauten Beine wieder auszuhaken. Ein "patentierter Laufmechanismus" sorgt dafür, dass der Roboter beim Laufen tatsächlich recht natürlich aussieht.

Wenn er denn laufen würde. Aber das tut er leider nicht. Irgendwo muss ich ein Kabel falsch oder zu locker gesteckt haben. Aber die Kabel stecken nun alle gut verpackt zwischen Boden- und Deckplatte. Sie sind mithilfe schwarzer Steckbretter, sogenannter Breadboards, untereinander verschaltet. Das viele Schwarz sieht cool aus, der richtige Anschluss ist aber auf den Fotos in der Anleitung verdammt schwer zu erkennen. Ich muss das Ganze wohl wieder auseinanderbauen, um den Fehler zu finden. Schade eigentlich.
Um nicht missverstanden zu werden: An sich hat Tino Werner, der seit 2013 biologisch inspirierte Roboterbausätze anbietet, auch mit diesem Bausatz solide Arbeit abgeliefert. Die Teile sind qualitativ hochwertig, die Maschine ist durchdacht und ermöglicht einen einfachen und spannenden Zugang zur Mechatronik. Was mir an der kompakten Anleitung allerdings fehlt, sind zwei Dinge: Zum einen hätte ich mir ein wenig Überblick und Einordnung gewünscht. Es macht mich rappelig, einer Bauanleitung minutiös folgen zu müssen, ohne zu wissen, worauf das Ganze hinauslaufen soll. Mindestens eine Prinzipskizze vom Antrieb und ein Schaltplan der Verdrahtung wären hilfreich gewesen.
Außerdem wäre es extrem nützlich, nicht erst ganz zum Schluss testen zu können, ob denn alles funktioniert. Zwischenstufen wären prima: Dass die Motoren nicht laufen, will ich nicht erst am Ende erfahren, wenn ich das Ding wieder komplett auseinanderbauen muss, um den Fehler zu finden.


